






























地球規模のカーボンニュートラル目標への貢献
2021-02-26
シェア:





国が省エネルギーと環境保護の問題により多くの注目を払うにつれて、風力エネルギーはクリーンで再生可能な世界の電力源として、ますます重要性を増している。中国の「30・60」脱炭素目標の下で、再生可能エネルギー、特に風力発電は、国の主流エネルギー源となり、炭素排出を削減し、最終的に炭素中立の目標を達成するための重要な道筋となっている。
01 洋上風力エネルギー開発の世界的リーダー
イノベーションへの奨励、税額控除、財政補助金...これらの支援政策と措置の実施により、国の海洋ベース経済の包括的な回復が導かれた。特に、海洋ベースエネルギー源の急速な発展は、中国の二重炭素目標を達成するための重要な道筋となっている。
炭素中立を達成するためには、まず石炭ベースの火力発電の使用を削減し、太陽光、原子力、風力、水力発電などのクリーンで再生可能なエネルギー源と交換する必要がある。

洋上風力発電は本質的に自然の風を利用してエネルギーを生成している。最近の研究開発の成果において、スマートグリッドの実装は、風力産業が風力発電所を効果的に利用し、運用保守コストを削減するのに役立つ技術の一つであり、国内初のインテリジェント風力発電所が江蘇省でグリッドに接続された。
中国は近年、世界第2位の風力発電市場となっている。最新のデータによると、同国の新規洋上風力発電容量は3年連続で世界をリードしている。2021年6月末現在、国内全体の洋上風力発電の累積設備容量は111億ワットを超えている。国際エネルギー機関は、中国の洋上風力発電設備容量が2040年までにEUと同等になり、排出削減能力がさらに向上すると予測している。
02 洋上エネルギーの従来の運用方法における課題
新興産業として、洋上風力発電は水中運用・保守に関する確固としたガイドがほとんど限られている。近年、これらの構造物の設置を急いだ後、必然的に様々な構造的問題が現れるだろう。構造品質を維持し、重大な問題を回避するためには、頻繁な専門的検査と評価のみが可能である。
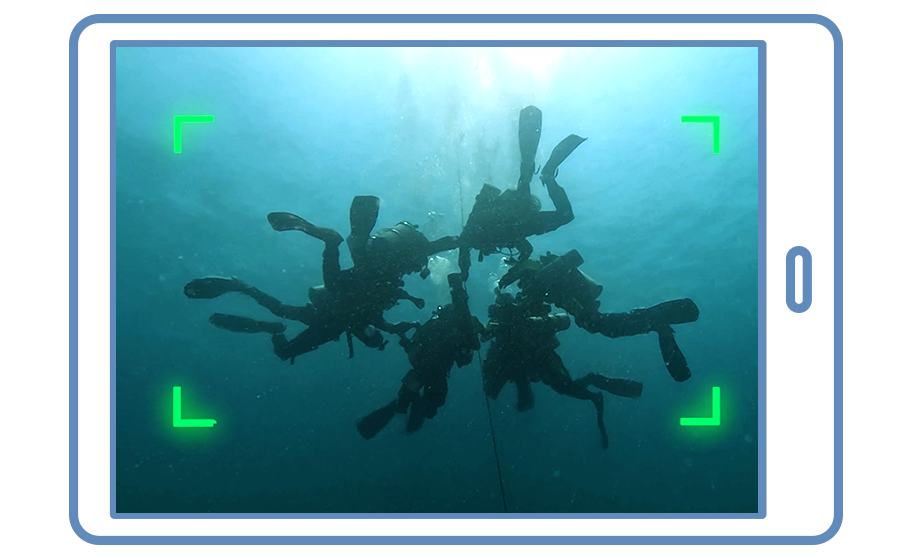
洋上風力発電の運用・保守タスクは主に、モノパイルフレーム、杭基礎、構造的洗掘、海底ケーブルなどの検査に分かれている。従来の評価方法は主に、ダイバーを暗くて狭いスペースに送り込んで作業させることであり、これは費用がかかり、時間がかかり、さらにリスクも伴う。

従来の運用方法の主要因子と課題
環境:水中の作業環境は複雑で予測不可能であり、ダイバーの作業中に潜在的に有害なリスクをもたらす。
時間:人的リスクに加えて、各ダイビングに必要な時間とエネルギーは最適ではなく、プロジェクトの遅延と追加コストを招く可能性が高い。
データ:現在、水中建設作業はリアルタイムフィードバック可視化とデータ収集システムが不足している。また、集団的意思決定を行う能力も限られている。
QYSEAが主導する業界では、水中ロボットが高解像度カメラとソナーシステムを装備して、陸上の作業者にエンジニアリング精度の評価、エンジニアリング効率の向上、プロジェクトの建設コスト削減を支援するための第一次情報を提供することが見られている。
03 ヘビーデューティー機能:波と業界の障壁を突破
多機能エンタープライズクラスROVプラットフォーム
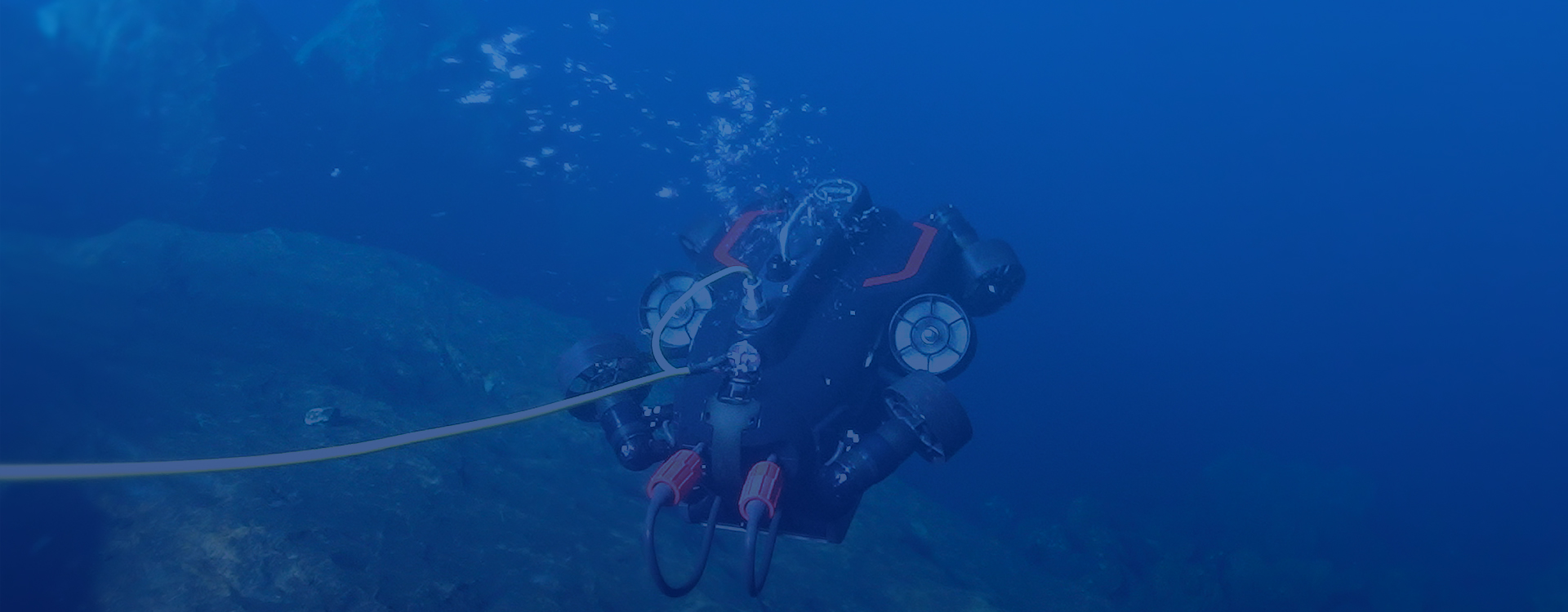
FIFISH PRO W6は産業クラスのROVプラットフォームで、全く新しい強力で特許取得済みのQ-Motorシステム、350メートルの潜水深度、強力な操作機能とツール、強力な海流に対するインテリジェント安定化システムを装備している。W6は革新的なモジュラー設計とインターフェースを使用し、様々な産業用水中アプリケーションのための部品とアクセサリーのシームレスな取り付け、交換、取り外しを可能にしている。パワー、精度、効率で動作する。
産業レベル水中ロボットの新たなベンチマークであるFIFISH PRO W6は、コンパクトなサイズ、長持ちする電力、拡張可能な機能において比類のない利点を持っている。
安全性: 最大350メートルの水深と最大4ノットの速度で、水中作業を高い安全性、安定性、精度で陸上から実行でき、過酷な海底環境での物理的作業の高いリスクを回避できる。
効率性: 最大350メートルの水深と最大4ノットの速度で、水中作業を高い安全性、安定性、精度で陸上から実行でき、過酷な海底環境での物理的作業の高いリスクを回避できる。
堅牢性と信頼性: ROV本体はカーボンファイバーブラケット構造を採用し、軽量で頑丈な構造を実現している。電力・通信ケーブルは頑丈なケブラー材料で作られており、最大200kgの引張力に耐える能力がある。
機能の拡張: FIFISHは合理化されたモジュラー設計を採用している。FIFISHはプロフェッショナル品質のアクセサリーのレンジを装備し、ROVのQインターフェースポートで簡単に取り付け可能で、様々な産業とアプリケーションに適している。
FIFISH PRO W6の3Dステーションロックアルゴリズムは適応性があり直感的なシステムで、水中でROVの位置をロックし、水中環境からのあらゆる干渉に対してロックされた位置に正確に戻る。例外的な安定性、滑らかさ、精度で検査を実行し、配信する。

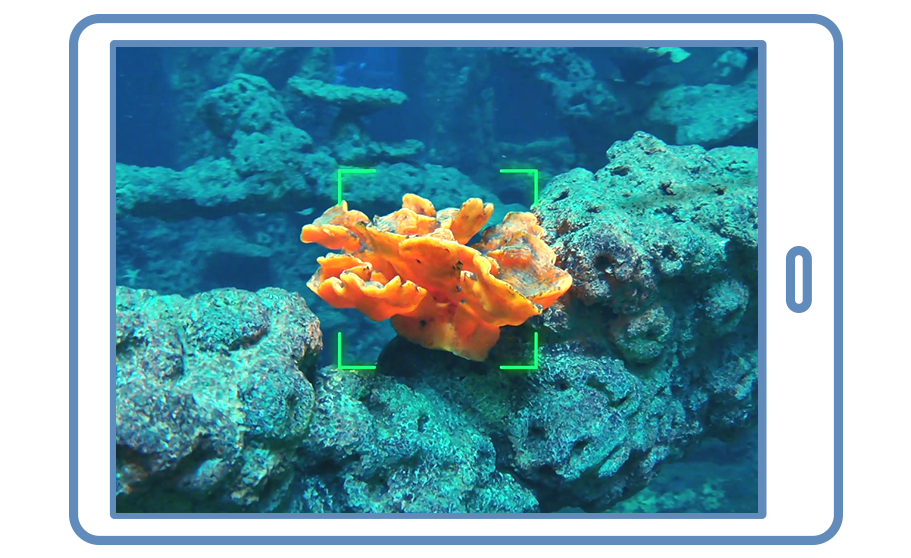
FIFISH PRO W6のデュアル4Kカメラシステムは、超広角の視野を提供し、検査タスクのより大きな効率を促進し、オペレーターに周囲の水中環境の完全な画像を提供する。このシステムにより包括的な検査が実行でき、FIFISH特許ソフトウェアとともに、プロフェッショナル組織とチームにとって有益な幅広いデータの収集が可能になる。
効果的で統合的なソリューション
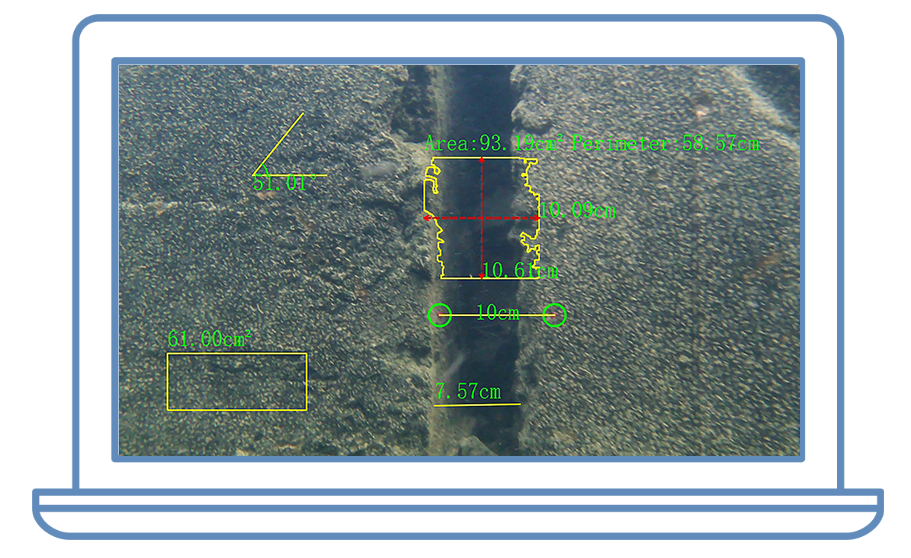
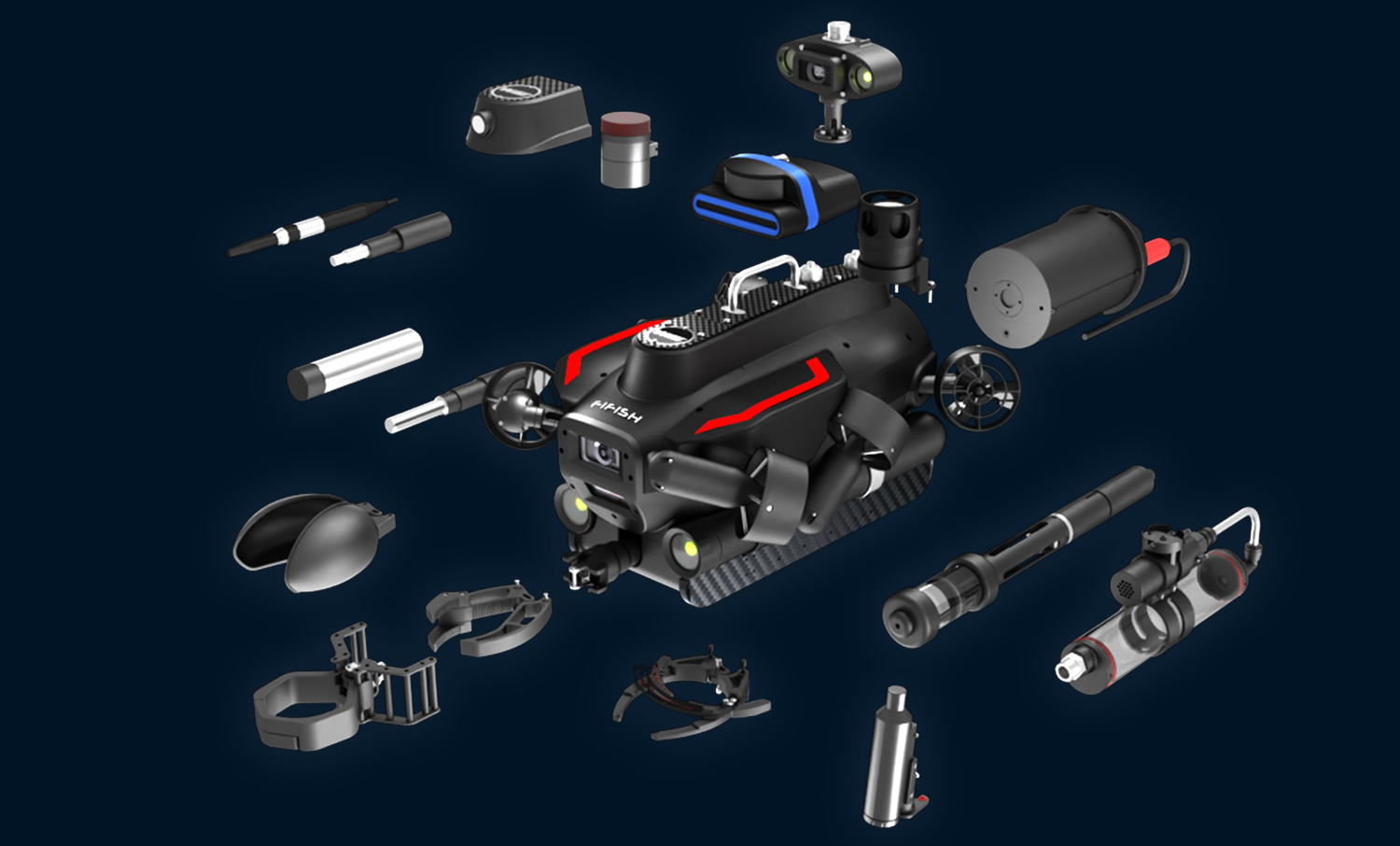
1. FIFISHは光学、音響、水質センサーを装備し、杭基礎、構造的洗掘、水中ケーブルを体系的に検査・評価する。
2. 緊急事態に迅速に対応し、長時間水中で作業し、海底検査を迅速かつ効率的に完了する。
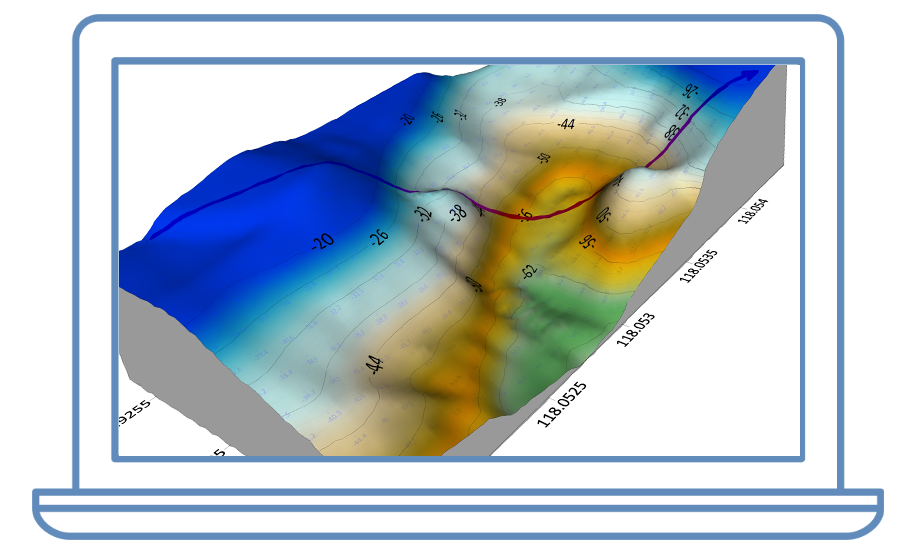
3. 定期的な検査と保守作業において、FIFISHの多次元センサーは深度、地形タイプ、侵食レベル、構造サイズなどの包括的な視覚データを提供する。

QYSEAは、海洋での探査と運用の方法を向上させるために技術革新を使用することにコミットしている。2016年に設立されたQYSEAは、水中ロボット技術、自律精密制御システム、人工知能の分野で業界のリーダーとなっている。このブランドは、その有利な機能性と構築品質により、世界が「Made in China」ラベルを見る方法を再定義した。
シェア:







