



























internation

“Once we switched to using the E-MASTER with the GNSS receiver, operations became much faster.”
— Jens Lindström, CEO, Nordic Maritime Group
Executive Summary
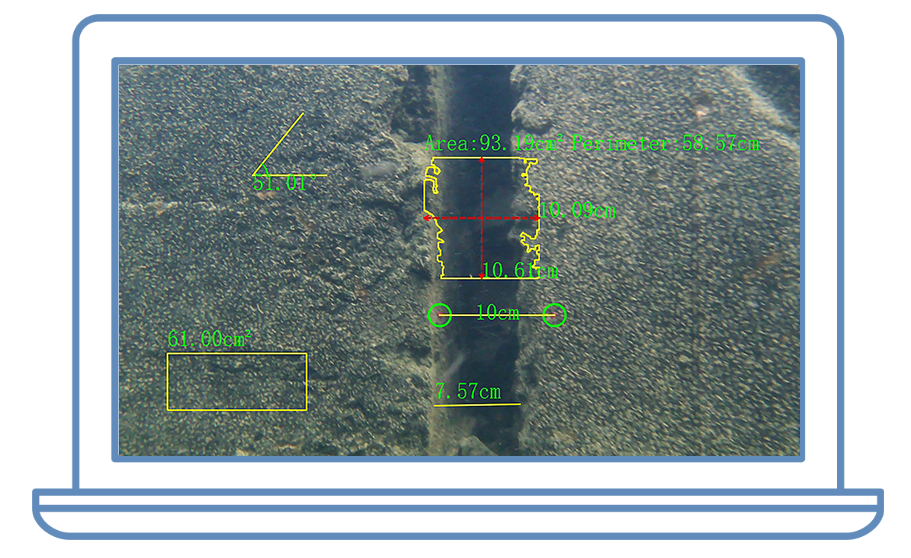
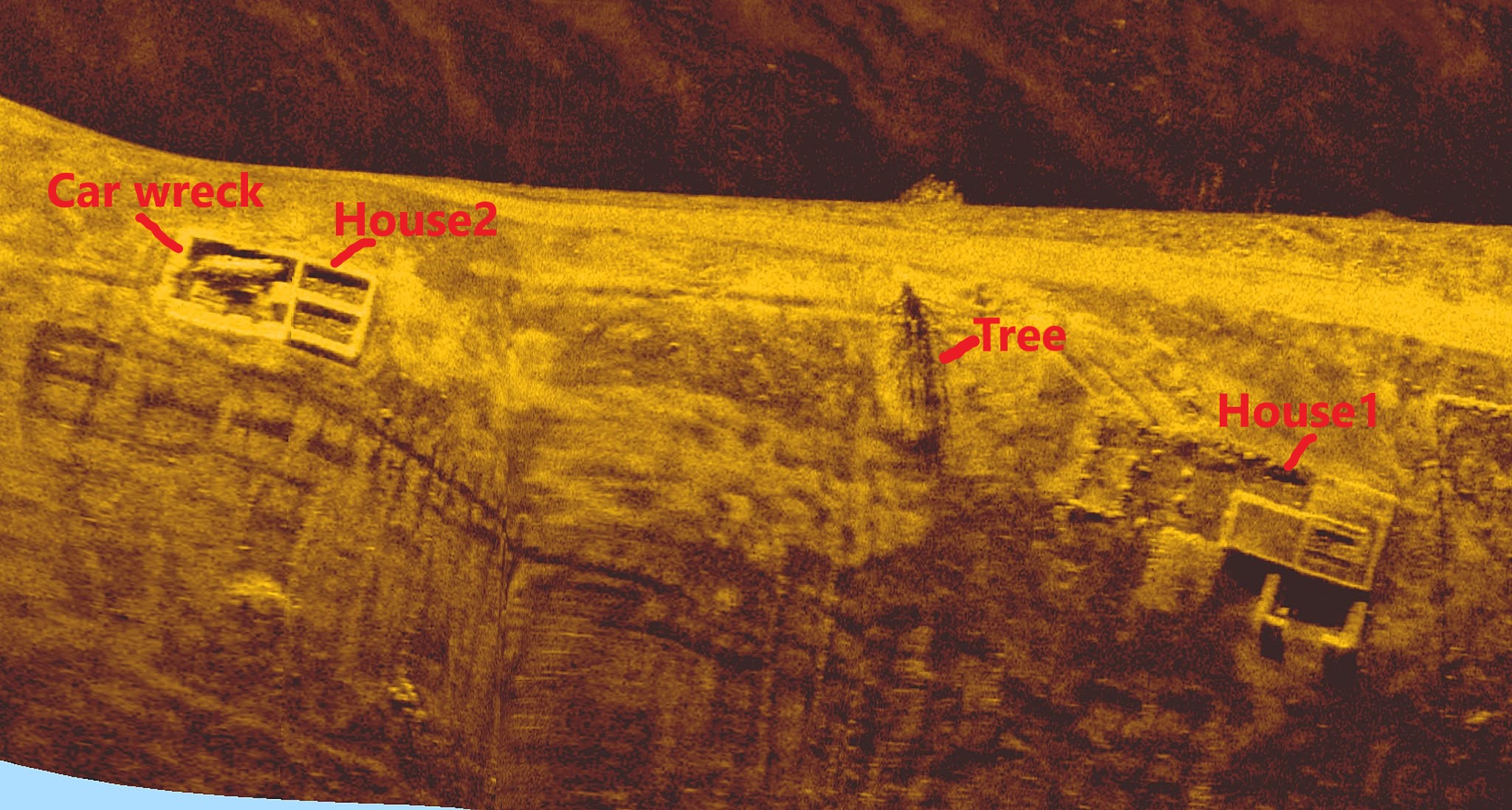
A large part of NMG’s day-to-day work starts the same way: a list of side-scan sonar targets that must be verified before offshore development, dredging, pipeline/cable routes, and other marine construction activities move forward.
The challenge is doing verification efficiently in cold, dark, low-visibility water without spending unnecessary time on surface marking, repositioning, and repeated setup cycles.
NMG adopted FIFISH E-MASTER NAVI to bring GNSS + DVL-assisted navigation into this workflow and accelerate multi-target operations.
The Operational Environment
NMG’s conditions can vary widely, but recent examples illustrate what makes the work demanding.
In the Baltic Sea between Sweden and Denmark, NMG operated at 35–55 m depth with ~1–3 m visibility at the seabed, surface currents around 0.5–1 knot, and bottom temperatures of ~10–12°C.
In a regulated reservoir in northern Sweden, depths were around ~20 m with ~3–4 m visibility on the bottom. Even with moderate visibility, the water is often dark enough that additional lighting is required.
Before E-MASTER NAVI: ROV-only Verification with Surface Marking
NMG’s first ROV-only inspection campaign took place off Copenhagen in August 2024.
The team inspected 255 side-scan sonar targets at 3–20 m depth using FIFISH E-GO without positioning. Each target required surface buoy marking.
On that campaign, productivity averaged ~10 targets/day, with a best day reaching 20 targets/day when conditions aligned. The work was completed by two people on a 7.5 m workboat.
In more offshore conditions later that year (deeper targets at 35–55 m), NMG worked from a ~35 m vessel with five vessel crew plus two ROV pilots, averaging ~4–5 targets/day.

Introducing E-MASTER NAVI: Changing the “Arrive → Verify → Repeat” Loop
NMG purchased E-MASTER in February 2025. As with any advanced workflow, there was an initial learning and stabilization period.
Jens reported early cold-water incidents where the ROV shut down unexpectedly despite battery indication, and he implemented a practical safety mitigation by adding flotation so the vehicle would ascend slowly in the event of a blackout.
The major operational shift occurred when NMG began using the Navi functions in earnest during an offshore wind-farm project in the North Sea (October).
After learning how to work with GNSS/DVL, NMG saw a clear pace improvement compared with buoy-marking workflows and compared with parallel operations using other small ROV systems that sometimes suffered position loss.
With E-MASTER + GNSS, the team could navigate on the surface to the inspection position, then descend directly to the seabed, reducing setup overhead and simplifying the repeat cycle across many targets.

Key Outcomes (as Reported by NMG)
Faster multi-target workflows once GNSS/DVL is part of the loop, with less reliance on surface buoy marking.
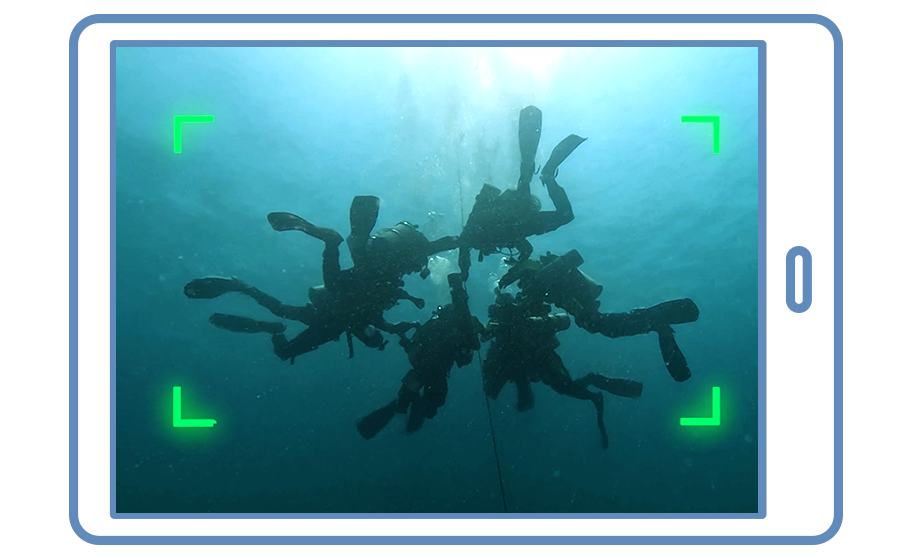
Meaningful staffing impact for first-pass verification: “Two people can now perform tasks that previously required a four-person dive team.”
Effective station-holding in currents up to ~1.5 knots (launch/recovery risk becomes the limiting factor in higher sea states).
Standardization intent: NMG plans to use E-MASTER as its primary ROV for comparable future projects.
Practical Workflow Lessons from the Field
Surface positioning and coordinate management
NMG notes that avoiding buoy marking saves time, but manual coordinate entry can become a bottleneck when a day includes many positions (for example, 27 inspection points on one project).
GNSS “refresh” behavior at the surface
Using the original cable and mounting bracket, Jens has seen GNSS fixes sometimes take up to ~5 minutes when affected by interference from vessels or nearby terrain.
Once the ROV is on the surface and ~10 m away from the vessel, it typically acquires a good GNSS position more quickly.
Team monitoring with multi-display output
To keep the whole crew aligned without crowding around the pilot, NMG runs the controller on a Samsung tablet and mirrors to a fixed 24” TV via USB-C to HDMI. For future sonar operations, they plan a dedicated tablet for sonar display.

Configuration Insights NMG Would Recommend to Other Professionals
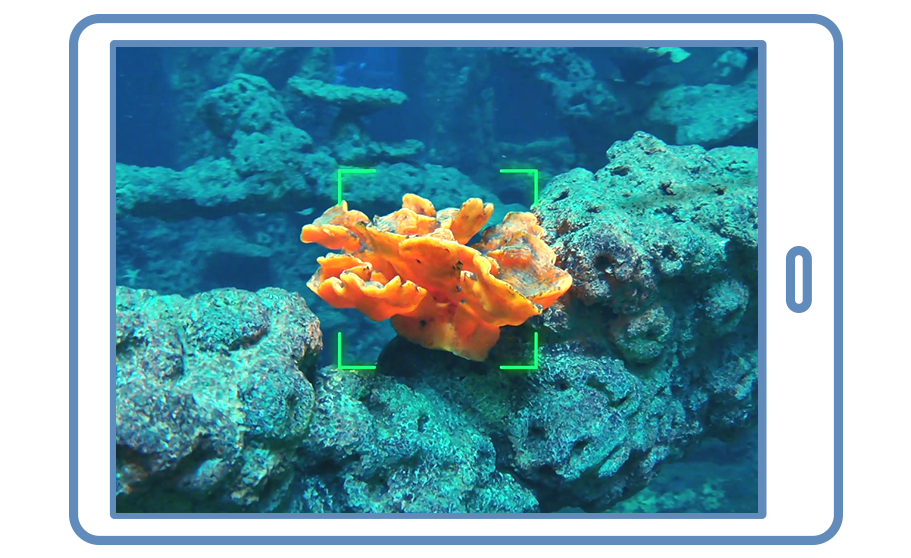
In turbid water, lighting geometry matters. Jens reports that external lights should be placed farther from the camera lens than built-in lights to reduce backscatter.
For low-light image sharpness, he sometimes mounts a GoPro Hero 13 (in housing) on top of the ROV to achieve sharper results than the built-in camera in challenging conditions.
For very poor visibility near the seabed, he emphasizes the value of slightly positive buoyancy to avoid continuous thruster corrections that can stir sediment and destroy visibility.
NMG also notes that archaeology still requires diver intervention at times, but as a ROV-first verification tool and for assessing real visibility/current conditions, ROVs provide a major operational advantage.

Looking Ahead
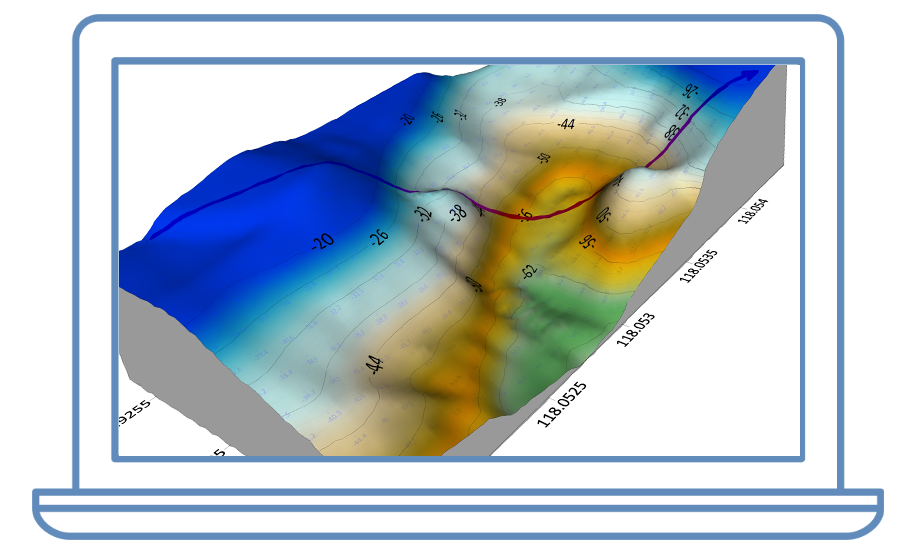
Over the coming year, NMG plans to deepen proficiency with Navi functions and pursue photogrammetry models of deeper shipwrecks (50–150 m), supported by more powerful video lighting and compact action cameras with alternate wide-angle lenses.
With extensive offshore wind development planned along the Swedish coast, NMG expects continued demand for efficient, evidence-grade underwater verification—and intends to keep ROVs central to that work.

Interested in a similar workflow?
If your team needs faster sonar-target verification, low-visibility documentation, or a practical ROV-first approach to reduce dive risk and staffing requirements, contact QYSEA to discuss an E-MASTER NAVI configuration for your operating environment.
All details summarized above are provided by Jens Lindström / Nordic Maritime Group in a written interview with QYSEA.
Discuss your inspection workflow
QYSEA’s NAVI solutions support repeatable target approaches, stable station-holding, and clearer documentation in low visibility.